|
電子書下載:KR260 賦能自適應機器人
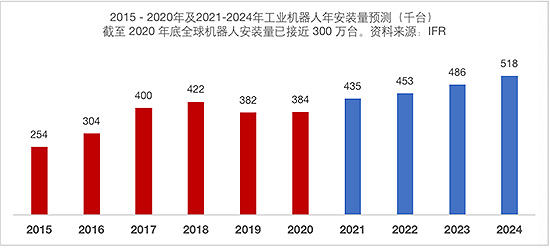
市場對機器人的需求一直在迅猛增長。研究機構 Statista 舉例表明,到 2028 年,全球工業機器人市場將從 2021 年的 810 億美元倍增到超過 1,650 億美元。目前,建造機器人所需技術不但安全可靠,而且能夠與人類並肩運行。不過,讓這些技術協作運行是一項艱鉅的任務。更為棘手的是,還需要融合人工智能,這使得滿足計算需求變得更為困難。為了跟上當今快速的創新步伐,機器人專家轉而求助於自適應計算平台。它們能夠在模組化平台(可面向未來需求進行擴展)上實現時延更低的確定性多軸控制,而且內置功能安全與信息安全功能。
本電子書將從當今機器人技術的常見挑戰開始向您詳細講述何為機器人?以及目前所存在的設計挑戰是什麼?並展望未來機器人技術,以及在引入自適應計算技術之後,機器人技術的發展和基於 ROS 2操作系統的硬體加速方案。
當今機器人技術與常見設計挑戰
機器人是設計用於執行特定任務的複合系統。它是軟硬體的終極組合。機器人專家採用網絡、感測器、致動器與計算資源的組合創建旨在簡化人類生活的精密機器。按照尺寸和用途可以分為:空中機器人、AGV/AMR機器人、協作機器人、人形機器人、工業/直角座標機器人、手術機器人等。
當今的眾多專業工業與醫療機器人都配備了兩種用於驅動其行為的主要技術:CPU 用於管理形成計算圖的複雜數據與控制架構,以及基於 FPGA 的自適應 SoC,用於獲取信號、對信號進行實時處理並將信號傳輸到 CPU 進行進一步處理。但是,大量計算性能依賴 CPU,其可以處理來自感測器與機械致動器的多個請求。但是,隨著計算圖複雜性的增加與類型的增多,CPU 即時響應時間關鍵型事件所面臨的難度也會提高。此時,效率會開始下降,最終隨著 CPU 時延增加而導致機器人性能降低。而引入自適應 SoC 則可以幫助卸載時間敏感型計算負載、加速硬體中的部分計算功能從而恢復計算與響應時間之間的平衡,以及降低並行執行計算的總功耗。另外,ASIC 等其他技術確實可以改善響應時間和緩解計算負載,但是機器人系統的特定特性要求具備現場硬體適應性,以應對不同的環境條件並提高網絡攻擊抵抗能力,而這不是一次軟體升級所能做到的。
自適應計算技術的引入與面向機器人的自適應 SOM
機器人的未來會在邊緣需要更多 AI 處理。多感測器分析與機器學習應用(包括預測性維護與故障檢測)會採用 AI 在本地做出即時決策,而無需依賴基於雲的感測器數據處理。另一個趨勢是 5G 無線技術與時間敏感網絡 (TSN) 的交匯。5G TSN 子系統可以通過促進機器人系統之間的連接而推動低時延、確定性時間敏感型工業與汽車應用的融合。關鍵應用包括工廠自動化、智能能源、交通運輸、ADAS 與車載信息娛樂系統。
自適應計算將多核 CPU(以高度優化的實時處理器及應用處理器集群組織而成)等功能模組與可編程邏輯、網格處理器及智能引擎結合在一起,從而在最理想的架構中實現了機器人工作負載的分配。如此強大的算力輔以功能安全能力,為機器人帶來了更加安全可靠的運行優勢,有助於避免數據洩露(降低機器人完整性並使其易受攻擊)。機器人是控制路徑與數據路徑的混合體,它們通過對外部事件(如視覺或感測器刺激等)進行響應而做出動作。自適應計算使它們能夠為正確的計算單元分配正確的計算負載。結合相關硬體可以實現全面的設計方案和運行時軟體,也就是說能夠為打造高度靈活和高效的系統提供更優化的平台。
• 提供強大的硬體加速支持
Kria™ KR260 機器人入門套件是繼 KV260 視覺AI 套件和量產型 K26 SOM 之後,KRIA 產品系列的又一全新產品。它能夠在模組化平台(可面向未來擴展)上實現時延更低的確定性多軸控制,且內置功能安全與信息安全功能,專為機器人以及工業自動化的開發人員打造以其熟悉的 ROS 2 為中心的開發體驗,針對工廠、農場、醫院和倉庫等應用場景下的視覺、通信和控制等方面提供硬體加速的優勢。與此同時,自適應 SOM 的優勢並不局限於硬體。
•
支持熟悉的軟體開發環境和框架
軟體開發者也可以利用面向自適應 SoC 的預置配置(如添加人臉識別算法)來加快設計週期。自適應 SOM 可以提供完整的固件基礎架構,以便採用 Python、C++ 等大家熟知的軟體開發語言以及 TensorFlow、PyTorch 等深度學習框架,通過簡單的現成加速通道運行機器人應用。

KRS 讓 ROS 2 開發更加簡單高效
來自 Open Robotics 的機器人操作系統 (ROS) 已經成為面向機器人應用的行業標準軟體開發平台。 ROS 包括用於開發機器人應用的開源軟體庫(如用於運動規劃與控制)與工具(如仿真、測試、調試),因此吸引日益增多的機器人專家為其開發與支持提供助力。
但是,在 ROS 工作流程中集成自適應計算的大多數嘗試都是從硬體工程師的角度出發的。而大部分機器人專家並非熟悉嵌入式流程與硬體流程的專家。所以,在將自適應計算直接集成到 ROS 生態系統之後可以為機器人專家提供其熟悉的用戶體驗。
KRS (Kria 機器人堆棧)是一組集成的機器人庫和實用程序,它們使用硬體來加速工業級機器人解決方案的開發、維護和商業化。它採用 ROS 2 軟體開發套件 (SDK),可實現以 ROS 2 為中心的開發方法,該方法從創建計算圖形到為應用商店提供的 ROS 2 覆蓋工作區實現商業化。這樣機器人專家就能夠集中精力改進計算圖,而不是努力成為硬體專家。
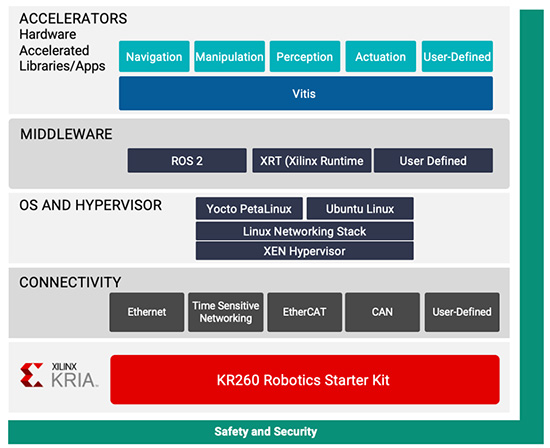
圖:Kria 機器人協議棧工具與組件
隨著 Kria KR260 機器人入門套件的發布,AMD 為AI 驅動機器人、機器視覺以及工業通信與控制等應用提供了開箱即用的開發平台,助力實現高性能、低時延與更快速的部署。
進一步了解自適應計算如何賦能機器人應用,歡迎點擊下方圖片,報名參加 6月28日 10:00 – 11:30,AMD Xilinx 舉辦的 KR260 線上專題研討會。參與本次研討會,您將了解到:
• 推動機器人未來發展的關鍵技術
• 主流機器人開發平台的基準測試
• KR260 入門套件硬體概述
• 可用於開箱即用的機器人系統的 Ubuntu 22.04 應用程序
• KRS (Kria Robotics Stack)如何使 ROS 2(Humble)開發簡單高效
• 對其他工業連接性的支持,如 SLVS-EC、10 GigE Vision 和 TSN 等
• 註冊研討會的用戶將免費獲取KR260中文電子書的推送。

Kria™ KR260 機器人 入門套件
6月28日|10:00 - 11:30
閱讀原文
|
