|
借助 ROS 2 實現軟體定義自適應機器人
作者:
Víctor Mayoral-Vilches,賽靈思機器人系統架構師
GiulioCorradi,賽靈思工業、視覺、醫療與科學首席架構師
FPGA 能夠自適應生成定制計算架構,以前所未有的靈活性、更短的設計週期、更低的開發成本,助力各類機器人應用。
01, 機器人是一種“系統集成藝術”
機器人是一種複合系統,它由感知周邊環境的感測器、根據感知採取行動的致動器和負責處理數據的計算構成,從而對其應用做出連貫一致的響應。在很大程度上,機器人技術是一種系統集成的藝術,在軟體和硬體方面皆是如此。
以往的研究揭示,機器人領域中多達 70% 的資源被用於集成,而不是用於開發最終應用。直到最近,隨著較低端的工業機器人走向大規模普及化,機器人公司才開始在硬體基礎上著重軟體開發。
儘管如此,機器人仍然是高度專業化的系統,旨在以高可靠性和高精度執行一系列任務。因此,機器人內部的硬體和軟體能力之間的關係十分重要。大多數機器人通過內部網路交換訊息並滿足時序要求。從這種意義上來講,機器人屬於時間敏感型網路,
02, 選擇“適合的計算平台”
機器人系統的機載資源通常非常有限,如存儲器、I/O 和磁碟或計算功能,會阻礙系統集成進程,使之難以滿足非結構化、動態和不斷變化環境的實時性要求。隨著機器人內部網絡安全的發展,這一點更是如此,因為它經常在使用壽命方面對機器人提出新要求,需要修改機器人的邏輯,從而對實時環路產生影響
正因如此,為機器人系統選擇合適的計算平台至關重要。該平台既要簡化系統集成、符合功耗限制,也要能夠適應機器人應用不斷變化的需求。
打造“自適應機器人” Building Adaptive Robots
自適應機器人是指那些能夠成功應對新狀況的機器人。一台能夠稱得上“自適應”的機器人,必須具備
以下三大特性其中之一。滿足全部三項特性的機器人,可視為“完全自適應機器人”。。
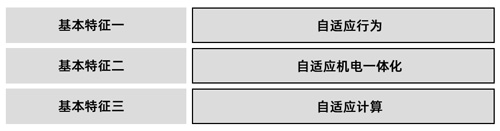
自適應機器人基本要求 |
自適應計算是自適應機器人的第三項基本特性。對於機器人而言,主要指機器人能夠在運行過程中適配其計算系統的一個或多個屬性(如確定性、功耗或吞吐量)。在此方面,FPGA 正是實現自適應計算的理想技術,因其兼具通用性和強大功能,同時效率高、成本低。
在 FPGA 上不僅可以實現其他處理架構,還可以實現並行處理。因此,FPGA 可以用於處理幾乎任何機器人內部的任務。另一方面,FPGA 能夠針對每一種機器人應用的需求,專門定制數據路徑寬度和寄存器長度。
如果說,CPU 和 GPU 是工人按照順序依次將輸入加工成輸出的車間,那麼,FPGA 就是靈活的自適應工廠,能夠針對手中的具體任務定制創設裝配線和傳送帶。
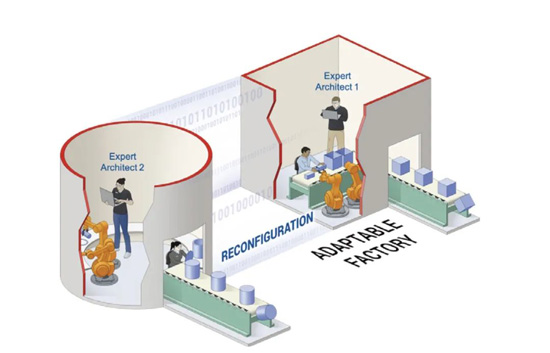
FPGA 的工業類比
Kria SOM 是機器人的理想計算平台
傳統的機器人軟體開發,是基於預先定義的架構和約束條件,在給定機器人的 CPU 中進行功能編程。一旦機器人遇到適配需求,就會導致複雜的系統集成操作。然而,如果使用 FPGA,構建機器人行為就是為解決任務的架構編程。機器人架構師可以純粹從軟體創建自己的硬體設計,並通過各種平台完成交付。
三種自適應計算解決方案
  
2021 年,賽靈思推出了自適應 Kria 系統模組(SOM)。作為機器人專家與 FPGA 技術交互的三種途徑之一,採用 Kria SOM 將預裝配電路板插入定制的承載電路板,能夠幫助硬體工程師加快產品開發速度,避免因計算平台分心,並集中注意力創造增值。
如需了解 Kria SOM ,以及 TSN(時間敏感型網絡)的專家介紹,歡迎點擊下方圖片,報名參加 Xilinx Adapt - 中國站,全中文講解與問答。
賽靈思最新白皮書《自適應計算在機器人領域的應用》,圍繞 ROS 2 機器人專家的視角講解自適應計算,提出了一種能夠讓 FPGA 在 ROS 2 生態系統中起主要作用的架構,適用於多種平台和技術且便於移植,為機器人專家充分運用自適應計算、實現軟體定義硬體鋪平了道路。
完整白皮書請點擊“閱讀原文”獲取。
閱讀原文
|
